Ученые МГТУ им. Н. Э. Баумана конкурируют с коллегами из США, Японии и Франции в создании подводных робототехнических комплексов. Работы эти пионерские, и данные о них очень скудные: до конца никто эту задачу не решил. Однако бауманская установка уже готова к натурным испытаниям.
«Система мониторинга технического состояния подводных объектов» – так называется тема, в рамках которой в Университете создают подводный робототехнический комплекс. Его назначение – обследование судов ниже ватерлинии на плаву.
Сейчас их тоже обследуют на рейде, так как обслуживание в сухом доке очень дорого. Эту работу выполняют водолазы. Они буквально «облепляют» днище и осматривают его: нет ли деформаций, сколов, трещин. Кроме того, измеряют толщину корпуса. Если есть деформация, то измеряют прогиб. Контролируют зазоры в винтовой паре корабля. Работа не только ответственная, но и трудная: требует знаний, внимания, хорошей физической подготовки, умения переносить тяжелые условия – ведь, например, воды северных морей даже летом не так приятны, как черноморские. Очевидно, что «человеческий фактор» играет большую и не всегда положительную роль в результатах такого обследования.
Федеральная целевая программа
– Минпромторг России и Российский морской регистр судоходства обратились к ученым Университета с предложением сделать процесс дистанционным и автоматизированным, – говорит Вадим Вельтищев, заведующий кафедрой СМ11. – Был заключен госконтракт с МГТУ, и мы, начав решать эту задачу, получили весьма обнадеживающие результаты. Первое подтверждение успеха – мы доказали, что роботизация этой операции возможна.
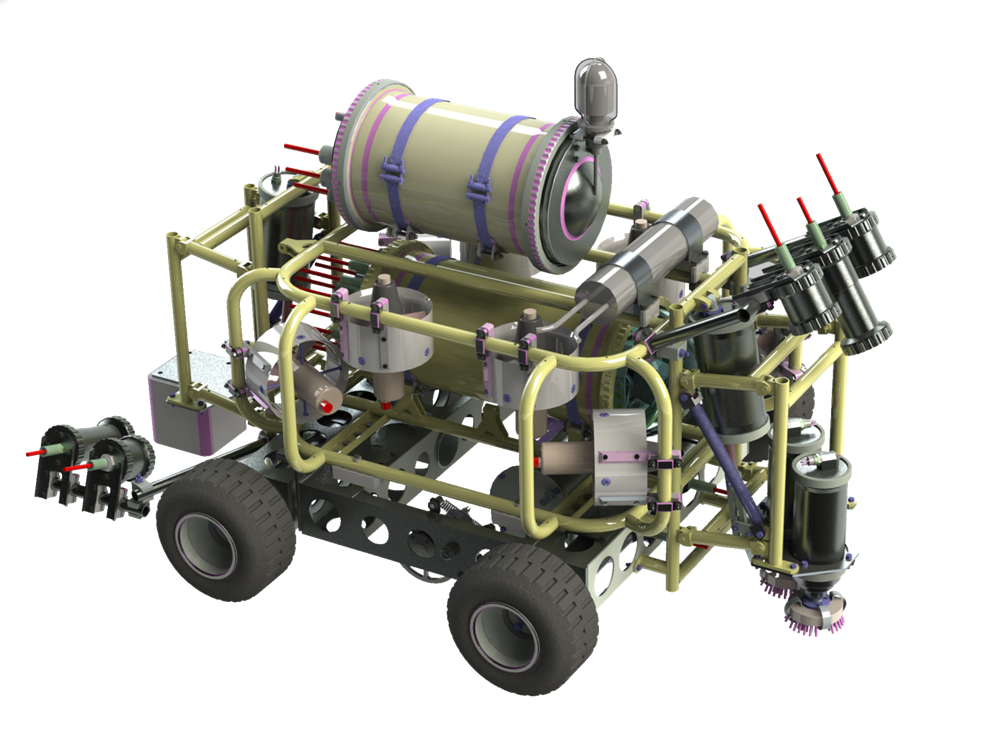
Действующий образец, созданный бауманцами, состоит из двух главных блоков: телеуправляемого подводного робота и акустической навигационной системы. Восемь винтомоторных двигателей обеспечивают прижим к кораблю, а привода колес перемещают робот по днищу судна. При помощи тех же винтов робот может и плыть. Управлять аппаратом можно в автоматизированном режиме, а можно и в ручном. Чтобы оператор мог видеть происходящее, предусмотрены три телевизионные камеры, есть подсветка.

«Были бы кости…»
Это, если можно так выразиться – «скелет». «Мышцами» могут стать самые разные устройства: зачистное (в виде щеток), ультразвуковые преобразователи для измерения толщины, «мокрый» сварочный аппарат и т. д. Робот движется по выбранной оператором поверхности и все, что видит – записывает, одновременно измеряя толщину корпуса судна.
– Мы пошли дальше технического задания, – говорит Михаил Григорьев, заместитель директора по научной работе НУЦ «Сварка-контроль» и директор Межотраслевого инновационного центра сварки оборонно-промышленного комплекса «Сварка» МГТУ им. Н. Э. Баумана, – сделали не только измерение толщины, но и дефектоскопию: оценку наличия повреждений в виде трещин. Если находим отклонения на корпусе, то робот с помощью щеток расчищает поверхность, расширяет площадь вокруг трещины, ищет причину ее образования. Мы планируем реализовать и технологию мокрой сварки – робот нашел трещину и заварил ее. Хотя бы даже временно, в виде экспресс-метода. В наших методах диагностики, измерения толщины и дефектоскопии заложены ноу-хау.
Кому это надо
Представители владивостокского Славянского судоремонтного завода увидели наш аппарат на Международной выставке судостроения, морской техники и транспорта VietShip 2016 во Вьетнаме и решили предоставить судно для испытаний. Его одновременно осмотрят и водолазы, и робот. Специалисты сравнят их показания и решат вопрос о покупке.
Подводный робот – удовольствие не из дешевых. Вьетнамцы, которым он очень понравился, не смогли его купить. Но продажи тормозит не только это. Новую операцию обследования судна необходимо прописать в нормативных документах Морского регистра. Сегодня там предусмотрен только один способ обследования – с помощью водолазов.
На делающий самые первые шаги диагностический комплекс уже возник неожиданный спрос. Разработкой заинтересовались в Росатоме. У этой госкорпорации есть бассейны выдержки, где хранится отработанное ядерное топливо. Эти бассейны надо обследовать, но там большая радиоактивность, и бауманский аппарат им очень подходит. Достаточно заменить обычные телекамеры на радиационно-стойкие (конструкция робота позволяет навешивать любое оборудование) – и можно работать.
Заинтересовались аппаратом и на морских буровых установках. Требуется обследование и опор мостов, различных свай и пр. Одним словом – «Система мониторинга технического состояния подводных объектов», как оказалось, необходима и на других объектах.
Успех не вскружил голову разработчикам.
– Очень важно, – говорит Вадим Викторович, – что мы правильно наметили основные направления создания этих комплексов. Гибридная установка, винты. Добиться успеха помогла коллаборация. В ней участвовали два коллектива, и каждый занимался своим делом. Кафедра сварки авторитетна в области диагностики, а СМ11 более 30 лет занимается подводной робототехникой. Технологии безлюдного обследования только начали появляться. Изделий такого класса в мире всего три-четыре. В России – это первое и единственное. Это пионерская работа, и не все получилось так, как бы хотелось. Систему надо дорабатывать.
Одновременно такие работы помогают повысить качество образования. Преподаватели, которые участвуют в новых разработках, получают дополнительный опыт. Он новый, а значит, студенты на лекциях узнают о новейших технологиях и материалах. Поняв, в чем были ошибки, преподаватель учтет их и будет учить студентов правильным подходам к работе. И будущие инженеры будут учиться на чужих ошибках.
О научных новинках узнавала Елена Емельянова